The Oxy Helicopter project is a natural evolution for Lynx Helicopters. Experience gained over many years of producing high quality upgrades has placed us in a unique position to enter the helicopter market. Our upgrades have been passionately developed by a core team of engineers and designers, delivering several breakthrough products which improved performance, reliability and maintenance costs of many helicopters. We see the market for small helicopters growing. Flybarless systems have allowed flight characteristics to mimic much larger models, and small brushless motors really pump out the power! It is relatively easy to produce a new helicopter. But much more challenging to design one which can be easily repaired and fly well again after a crash. Here at Oxy, were are not only engineers and designers – we are pilots, and have a clear vision what both 3D pilots and sport pilots require in a helicopter!
Using the feedback gained from the upgrade market, our unique consolidated design and manufacturing practices, access to the best materials, a huge team of enthusiast supporters and test pilots from all over the world, as well as a powerful distributor network, Lynx Heli has decided to meet market demand for high performance helicopters by forming Oxy Helicopters. We will foster open collaboration with dealers and customers in the community to have the best designs possible.
There is a market emerging for high performance helicopters in the 180 to 350mm blade size. Customers don’t want a whole package – they want to pick preferred components like FBL system, blades, motors, servos, ESC, etc. Oxy Helicopters will have top-class, explosive performance, fitting for the best 3D pilots in the world. They will also appeal to sport pilots looking for a high quality, versatile product which is simple to build, maintain and set-up, with clean lines and is crash tolerant. The Oxy Helicopter project is the synthesis of years of ideas. We keep our helicopters simple, robust, light, and of a distinctive style
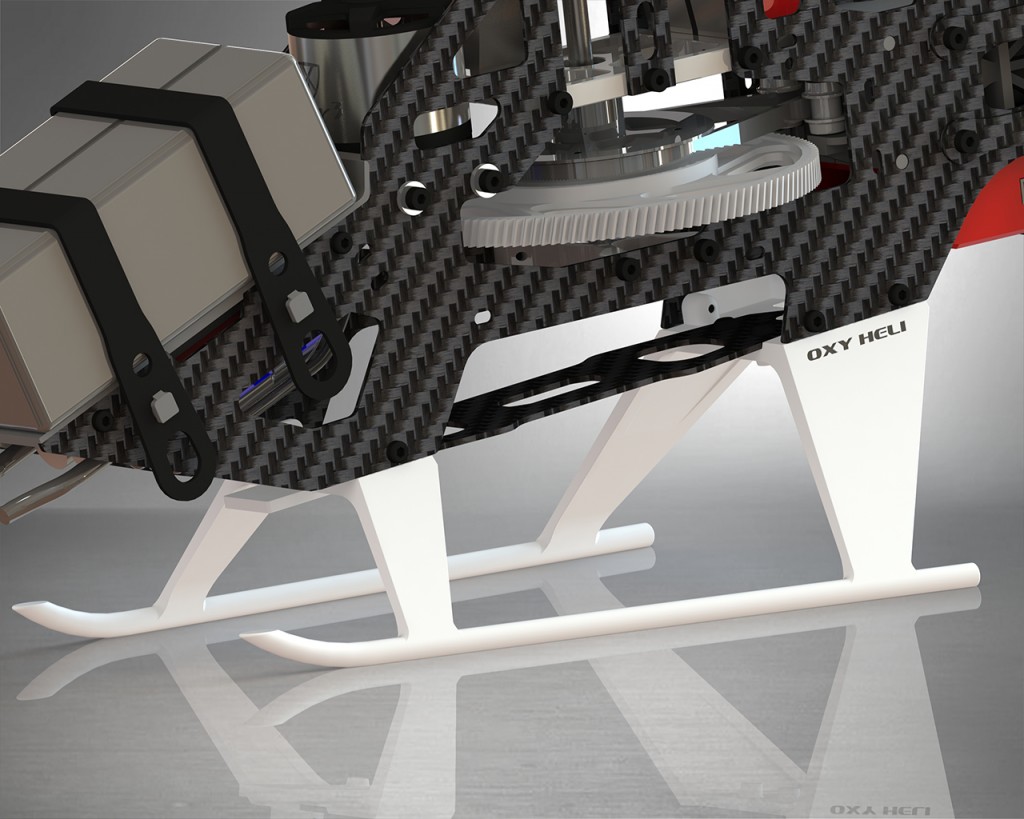
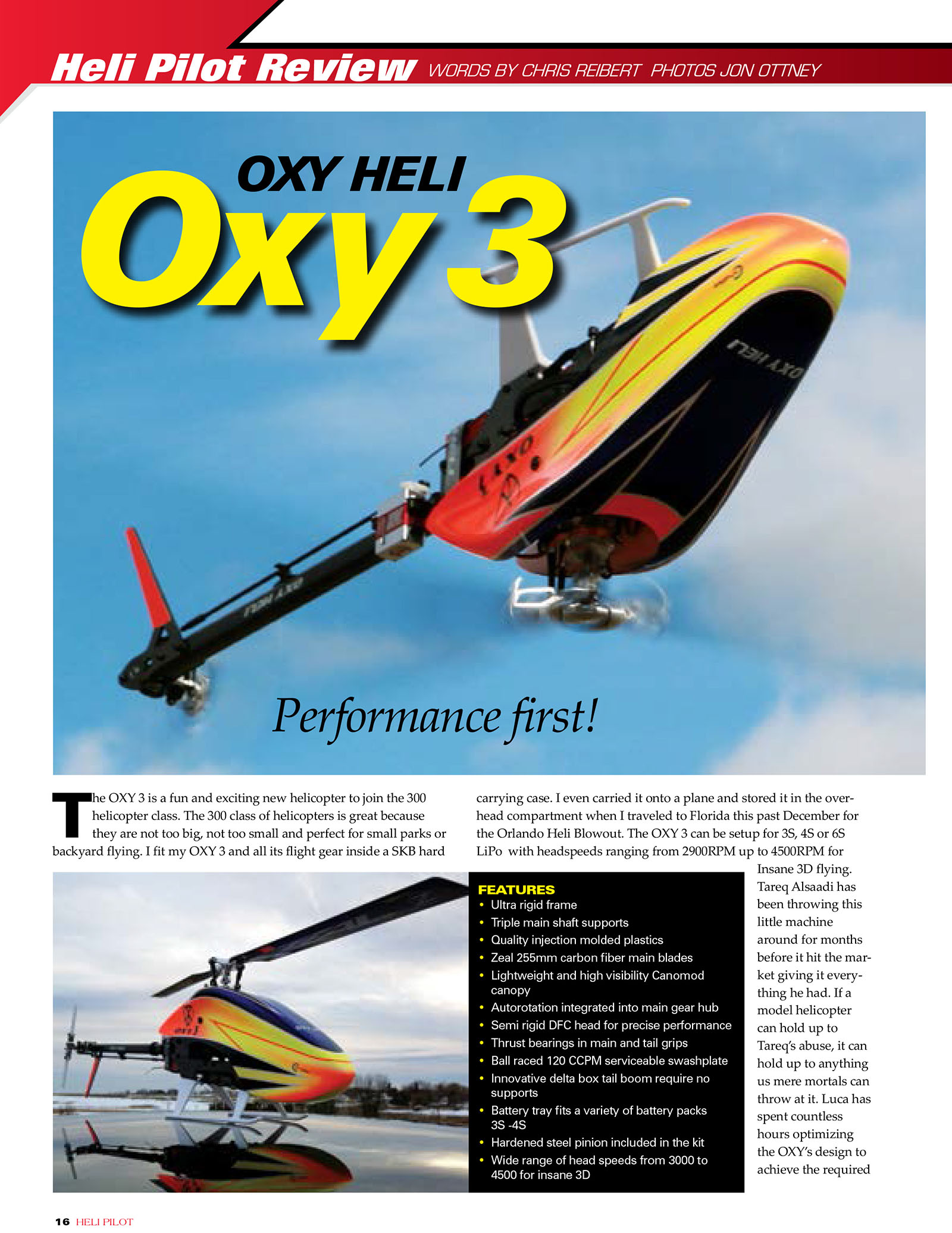
Oxy 3 is the first helicopter in the Oxy Helicopter range. It is a 250 mm blade electric heli, with belt driven tail rotor, suitable for all micro servos. It is designed to handle high rpms (up to 4500), and in the future can grow with a stretch kit up to 280mm blades. Special upgrades will be available to run 3 or 4 blade heads, and a full fuselage to satisfy the requirements of all users
- Ultra rigid frame
- Triple main shaft supports
- Quality injection molded plastics
- Lightweight, high visibility and high-end airbrush canopy from Canomod
- Autorotation integrated into main gear hub
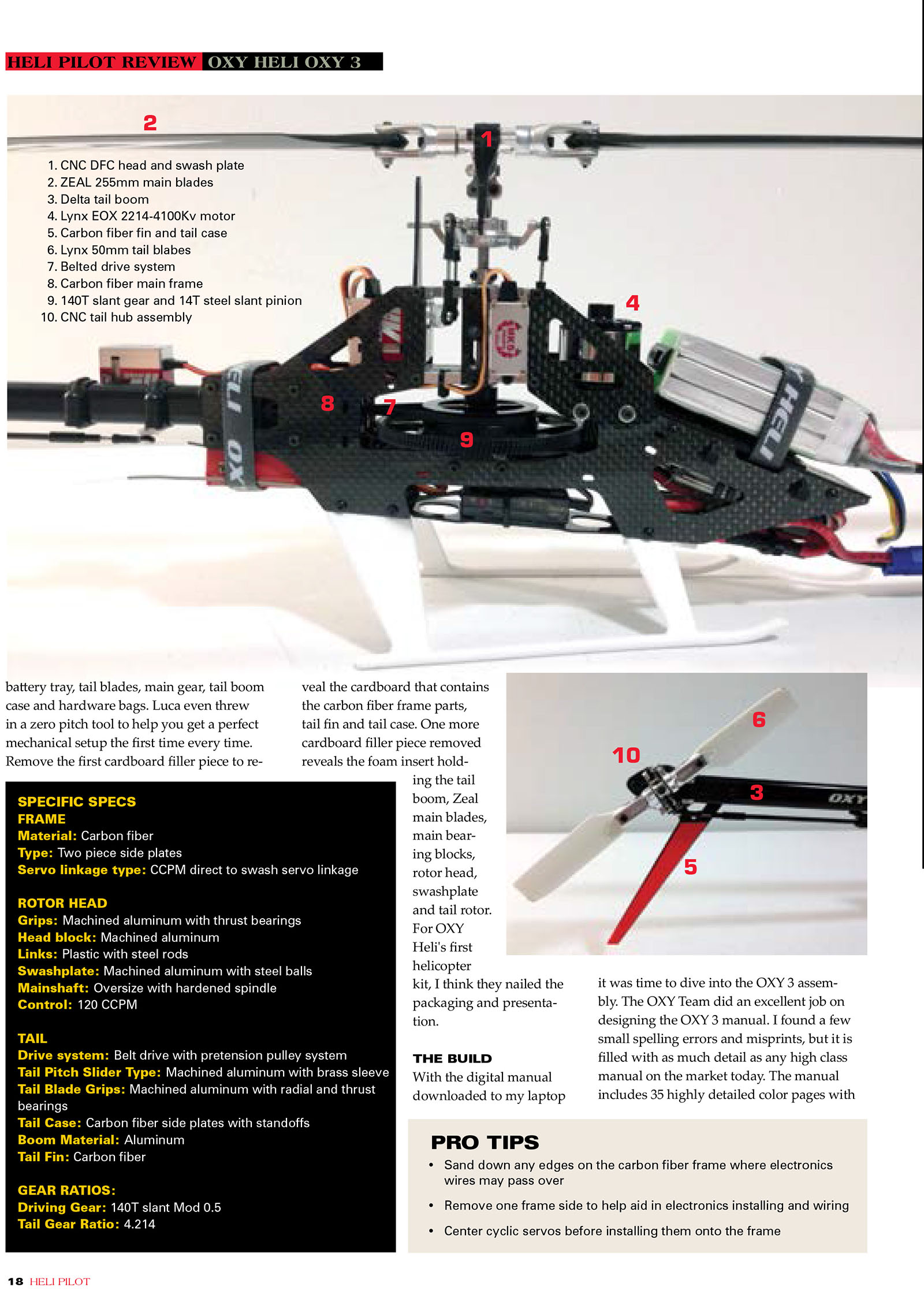
- Semi rigid DFC head for precise performance
- Thrust bearings in main and tail grips
- Oversize hardened spindle
- Ball raced 120° CCPM serviceable swash plate
- Swashplate linkages optimized geometry
- Belt drive tail (low parts count and low crash cost)
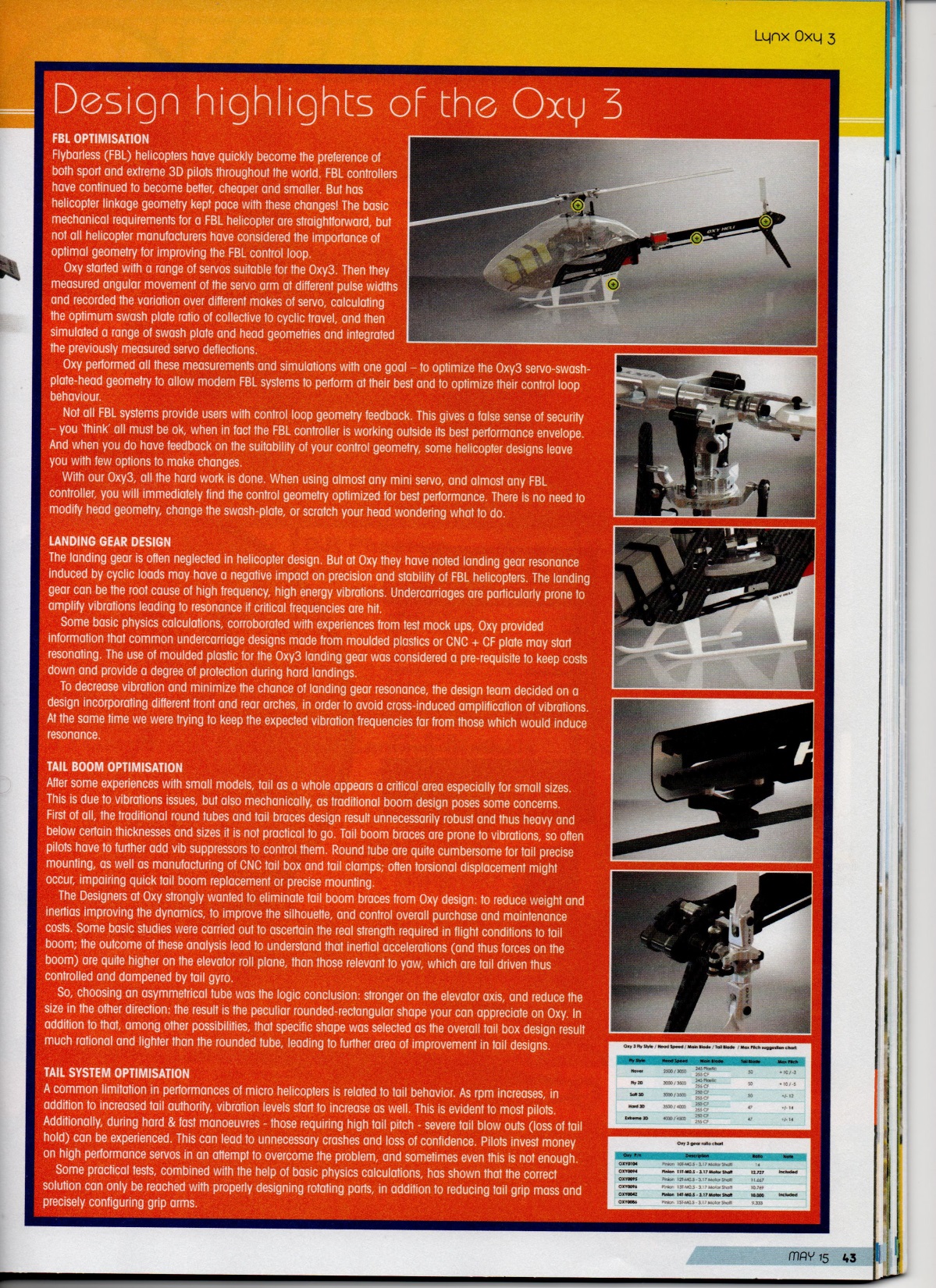
- Innovative delta box tail boom with no requirement for boom supports
- Tail optimized to minimize vibration and servo load at high tail speed
- CNC tail pulley with pretension pulley system
- Rigid carbon fiber 3mm diameter tail push rod for the increased tail control
- Battery tray fits a variety of battery packs 3s -4s (1300 to 1600 mAh) , 6s (800 to 950 mAh) – max length 75mm
- ESC support suitable for 25 – 40A ESC and more
- Kit Motor: EOX 2214 – Black Edition – 4100KV – 3.17mm Shaft – suitable for 3s and 4s battery packs
- Hardened Steel Pinion included in the kit: 11T suitable for 4s – 4100 kV motors and 14T suitable for 3s – 4100 kV motors(optional pinions: 12-13-15)
- Suitable for most micro cyclic and tail servos
- Smart and clean electronic wiring set up
- Length: 530mm Height: 175mm Width: 80mm
- Main rotor blade length: 255mm
- Tail blade length: 47mm and 50mm in std kit for diferent tail autority need (suggested 47mm for Hard 3D Set-Up)
- Slant main gear: 140T 0.5 Mod
- Wide head speed range: 3000 for sport flying a to 4500 for insane 3D
- Tail gear ratio 4.214 (14T pulley) for 3800 – 4500rpm
- Approximate RTF weight: 580g with 3s 1300mAh battery– suitable for 3.5 minutes of intense 3D at 4000rpm

 |  | |
| Model number | OXY3-255 | OXY3-Tareq Edition |
| Oxy 3 Kit DFC Head | ||
| Optional FBL Head System Set | ||
| Plastic Main Blade 250mm - Orange | ||
| Zeal CF Main Blade 255mm | ||
| Zeal CF Main Blade 285mm | ||
| Zeal CF Main Blade 255mm - Tri-blades | ||
| Tail Blade 47mm | ||
| Tail Blade 50mm | ||
| Tail Blade 47mm - Tri-blades | ||
| Pinion 11T | ||
| Pinion 14T | ||
| Tail Shaft 15T Pulley | ||
| Oxy 3 Service Towel | ||
| Swash Plate Leveler Tool | ||
| Retail Price | $215.00 | $285.00 |
| Where to buy | Where to buy |